Introducing a Python-Based Synthetic 2D LiDAR Scan Generator
In the field of robotics and autonomous systems, LiDAR sensors play a pivotal role in enabling precise environmental perception. Developing algorithms for LiDAR data processing requires iterative testing in various scenarios, which can be time-consuming and resource-intensive when using physical sensors or physics simulator like Gazebo.
To address this challenge, I have created a Python-based Synthetic 2D LiDAR Scan Generator, designed to streamline algorithm prototyping and validation in an accessible and simple virtual environment.
Motivation
The motivation behind creating this simulator stemmed from the need for accessible tools that facilitate the rapid development and refinement of 2D LiDAR algorithms. Other solutions I've explored either lack the flexibility needed or prove too complex for initial prototyping phases, particularly in achieving this using Python.
This simulator aims to fill this gap by providing a straightforward platform for simulating LiDAR scans in a controlled virtual warehouse environment.
Key Features
Customizable Simulation Parameters
The simulator offers users the ability to adjust crucial parameters such as Lidar specifications:
- the number of beams (
num_beams) - maximum detection range (
max_range) - scanning angle (
scan_angle).
Additionally, developers can select the warehouse layout and adjust obstacle sizes and other parameters.
This level of customization empowers developers to create diverse testing scenarios that are finely tuned to meet specific algorithmic requirements.
Realistic Obstacle Detection
Utilizing integrated parametric linear equations solving algorithms, the simulator detects realistic obstacles within the LiDAR scan range. This capability offers valuable insights into the performance of obstacle detection algorithms across different conditions.
Visualization and Analysis
Generated LiDAR scans are visualized using matplotlib, illustrating the distribution of detected obstacles and valid points within the simulated environment. This visualization aids in understanding algorithm outputs.
Getting Started
Installation and Setup
To begin using the Synthetic 2D LiDAR Scan Generator:
-
Clone the repository from GitHub:
git clone https://github.com/robotcopper/Synthetic2DLidarScanGenerator.git cd Synthetic2DLidarScanGenerator -
Install the required Python packages:
pip install -r requirements.txtRunning the Simulation
- Open and run the Jupyter Notebook (
lidar_simulation.ipynb) provided in the repository. - Adjust simulation parameters as needed to explore different LiDAR scan scenarios.
- View the generated plot (
plot.png) to analyze the simulated LiDAR scan results.
Example Output
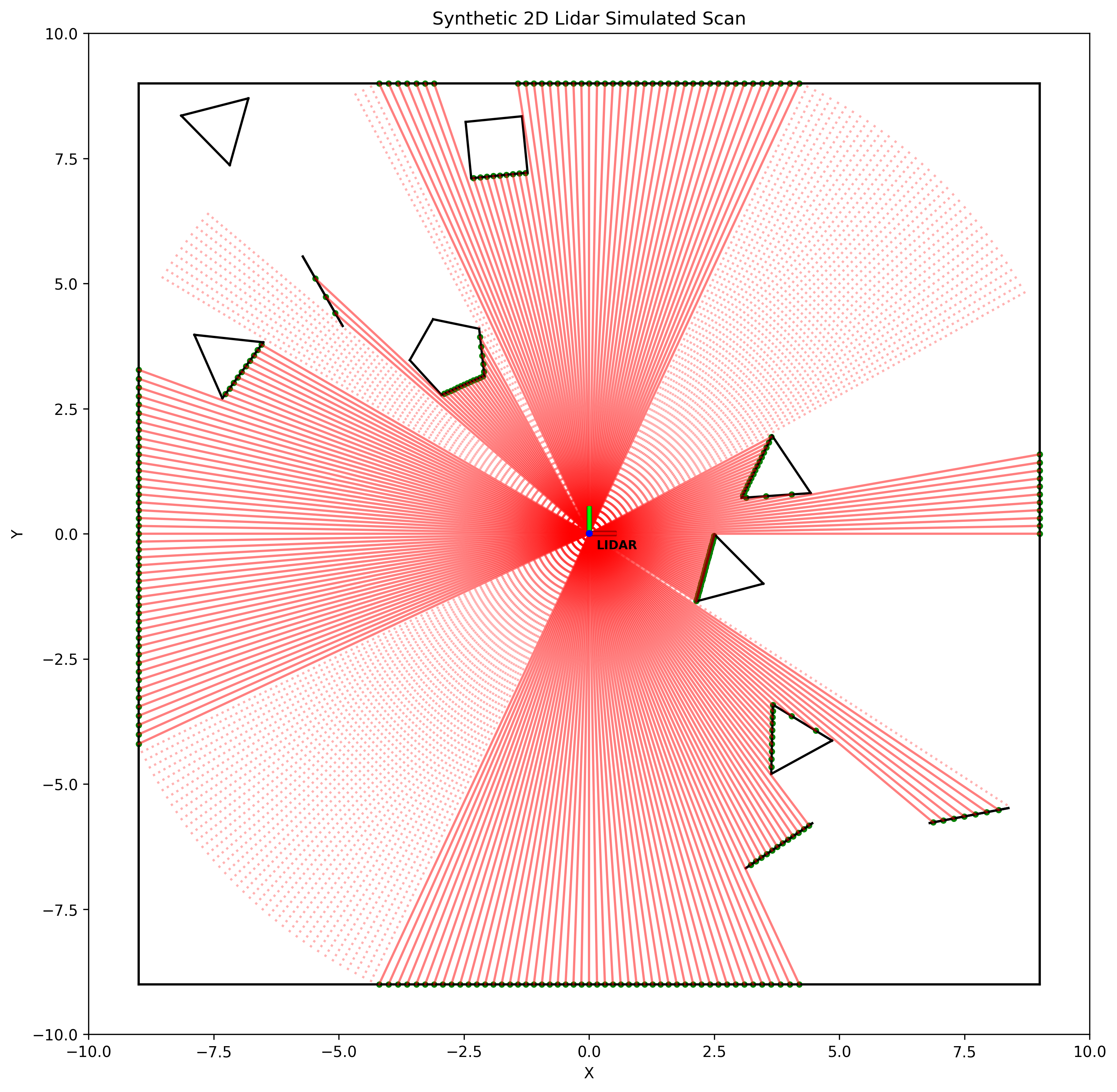
This example showcases the simulator's capability to simulate a LiDAR scan in a virtual warehouse environment, demonstrating obstacle detection and visualization.
Contribution and License
Contributions to enhance the simulator are encouraged since the simulator is intentionally kept simple and can be further improved and expanded . This project is licensed under the BSD 3-Clause License – see the LICENSE file for details.
Conclusion
The Synthetic 2D LiDAR Scan Generator provides a tool for developers aiming to accelerate the development cycle of 2DLiDAR-based algorithms.