Welcome
Welcome to my website, a space dedicated to sharing my writings, creations, experience and discoveries in the fields of Robotics, Mechatronics, Electronics, and Machine Learning. Feel free to explore, read, and be inspired by what you find here if you wish!
My ongoing endeavors will continue to enrich this site. Here, you will find:
Projects Documentation
Explore detailed documentation on my open-source projects, covering various aspects of electronics and robotics.
Templates
Find templates that I've created to help streamline your own projects, all available under the BSD 3-Clause license.
Articles and Tutorials
Read articles and tutorials that I have written, sharing knowledge and insights on robotics, mechatronics, and more.

Gallery
Browse through a sample of my involvement in images
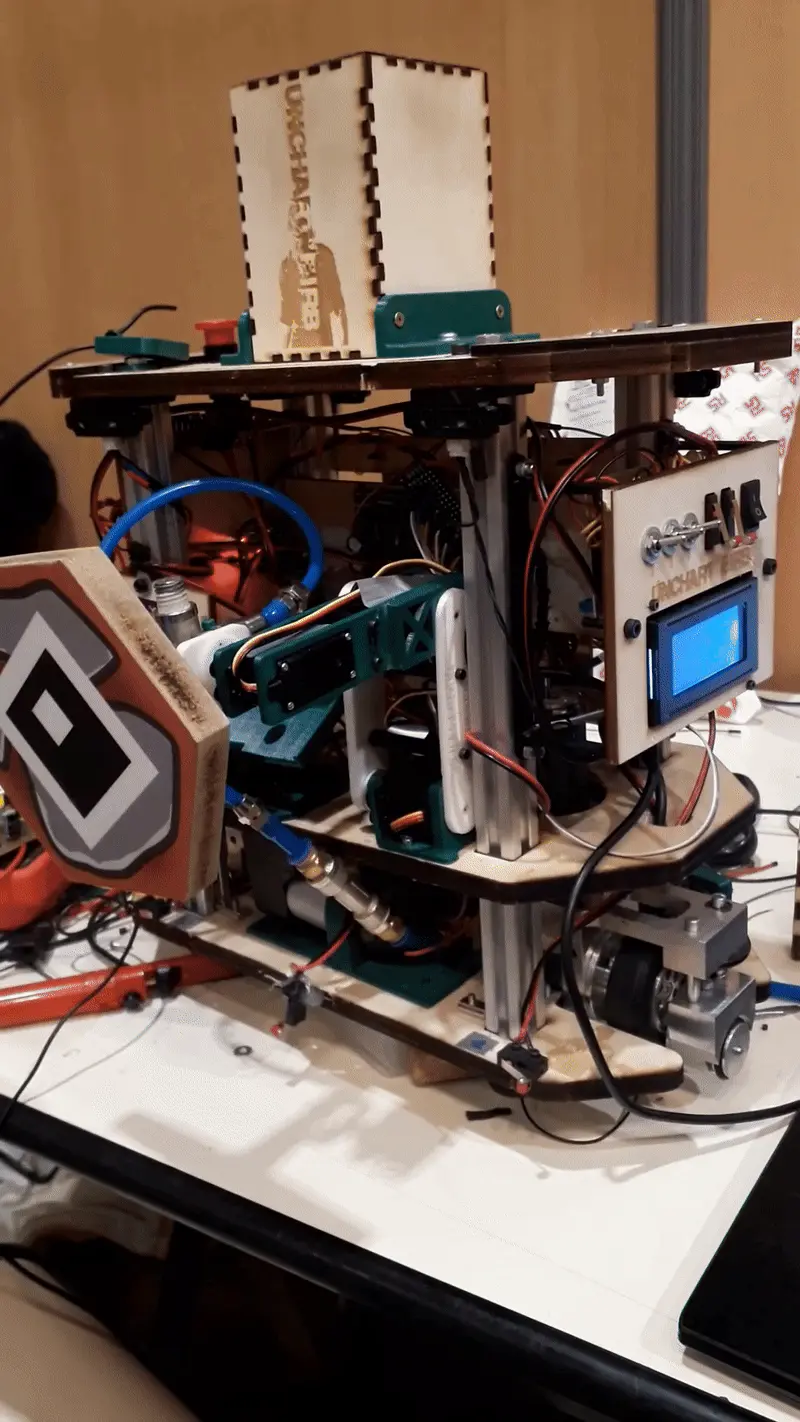






The robotic arm I created for my first participation in the French Robotics Cup,
as part of the Unchart'eirb team from the Eirbot association, in my first year of engineering school
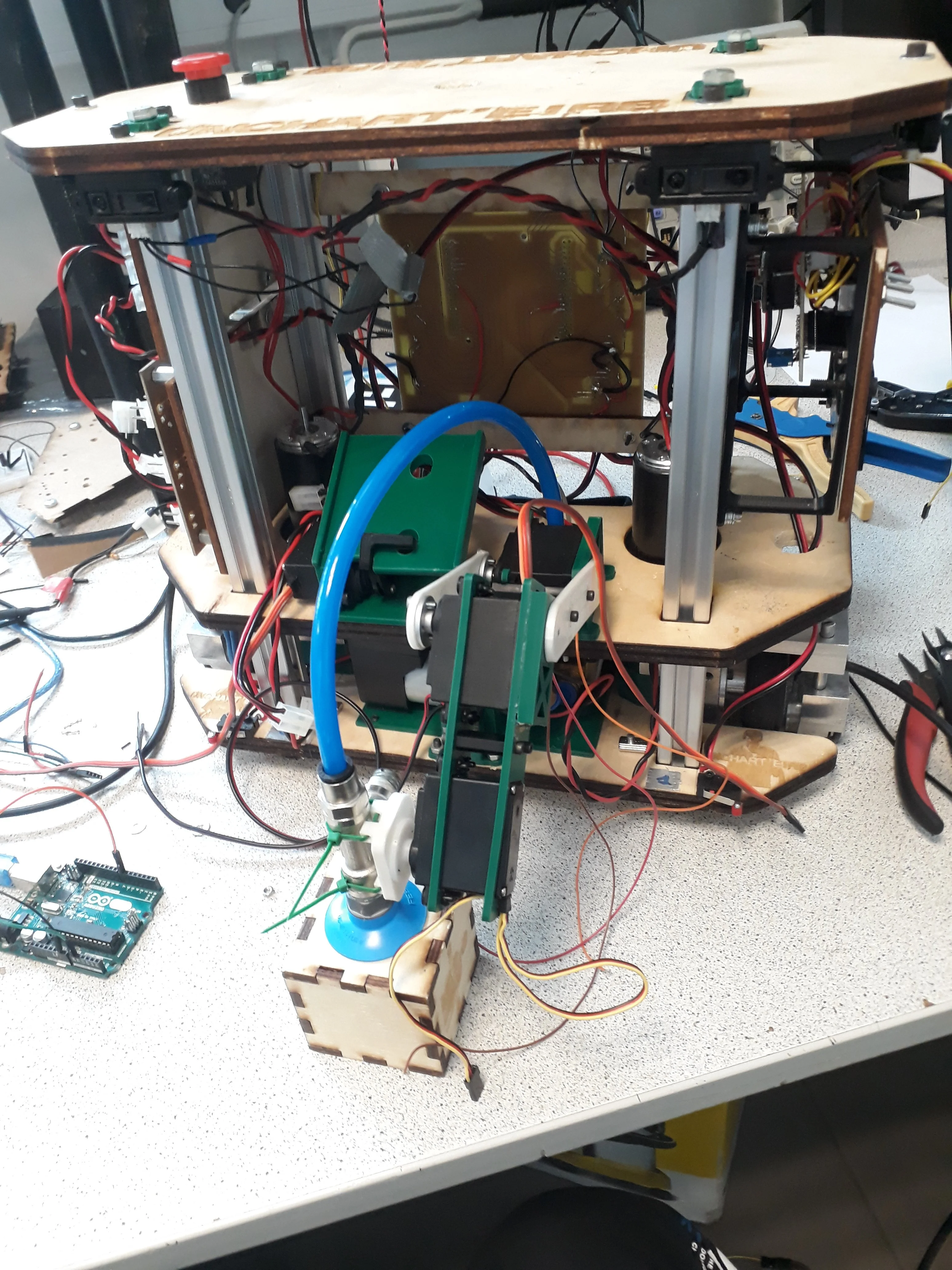
The robotic arm I created for my first participation in the French Robotics Cup,
as part of the Unchart'eirb team from the Eirbot association, in my first year of engineering school
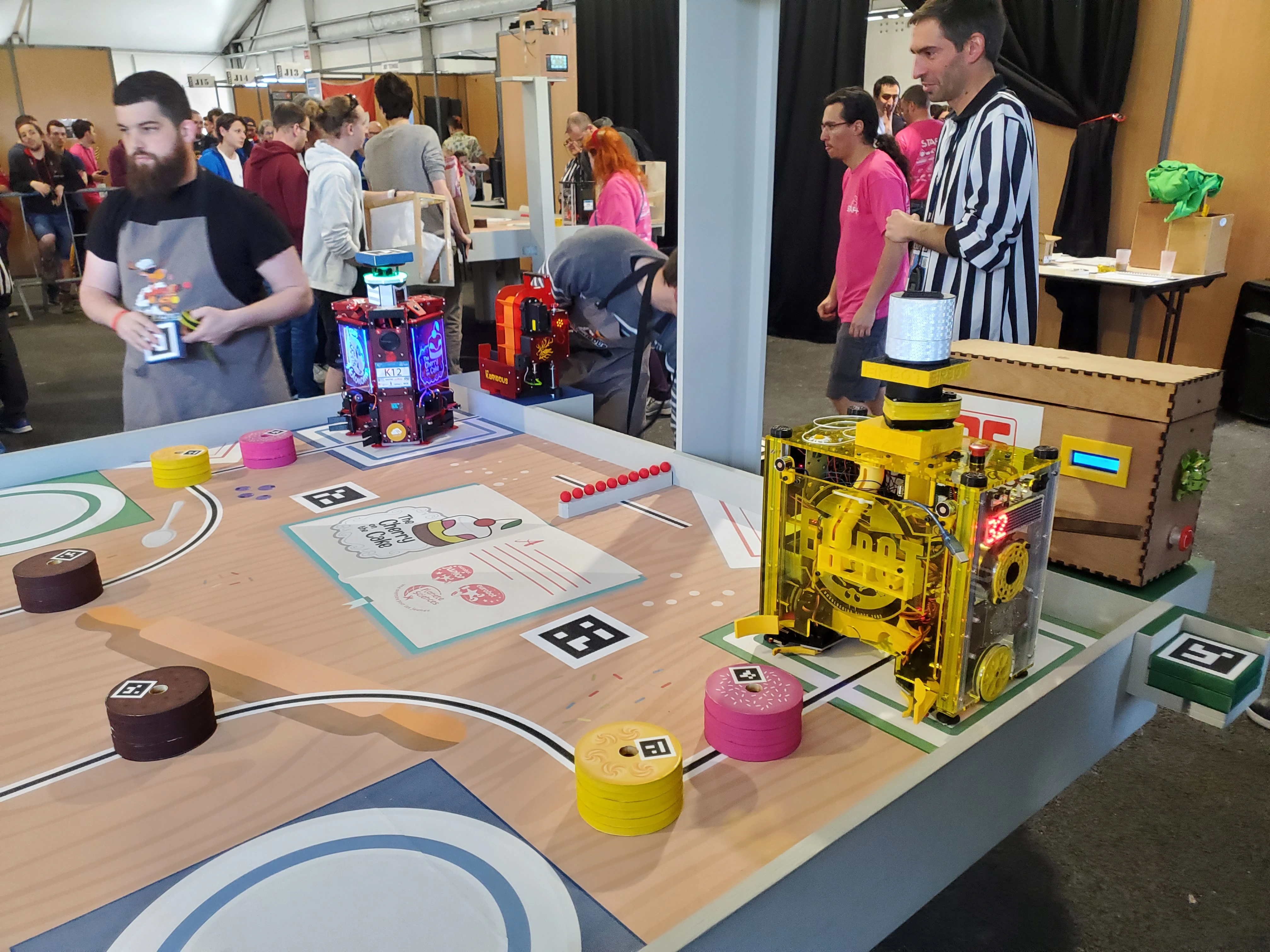
Me on the competition stage, readjusting the robotic arm before the first match of our Unchart'eirb team at the French Robotics Cup, representing the Eirbot association
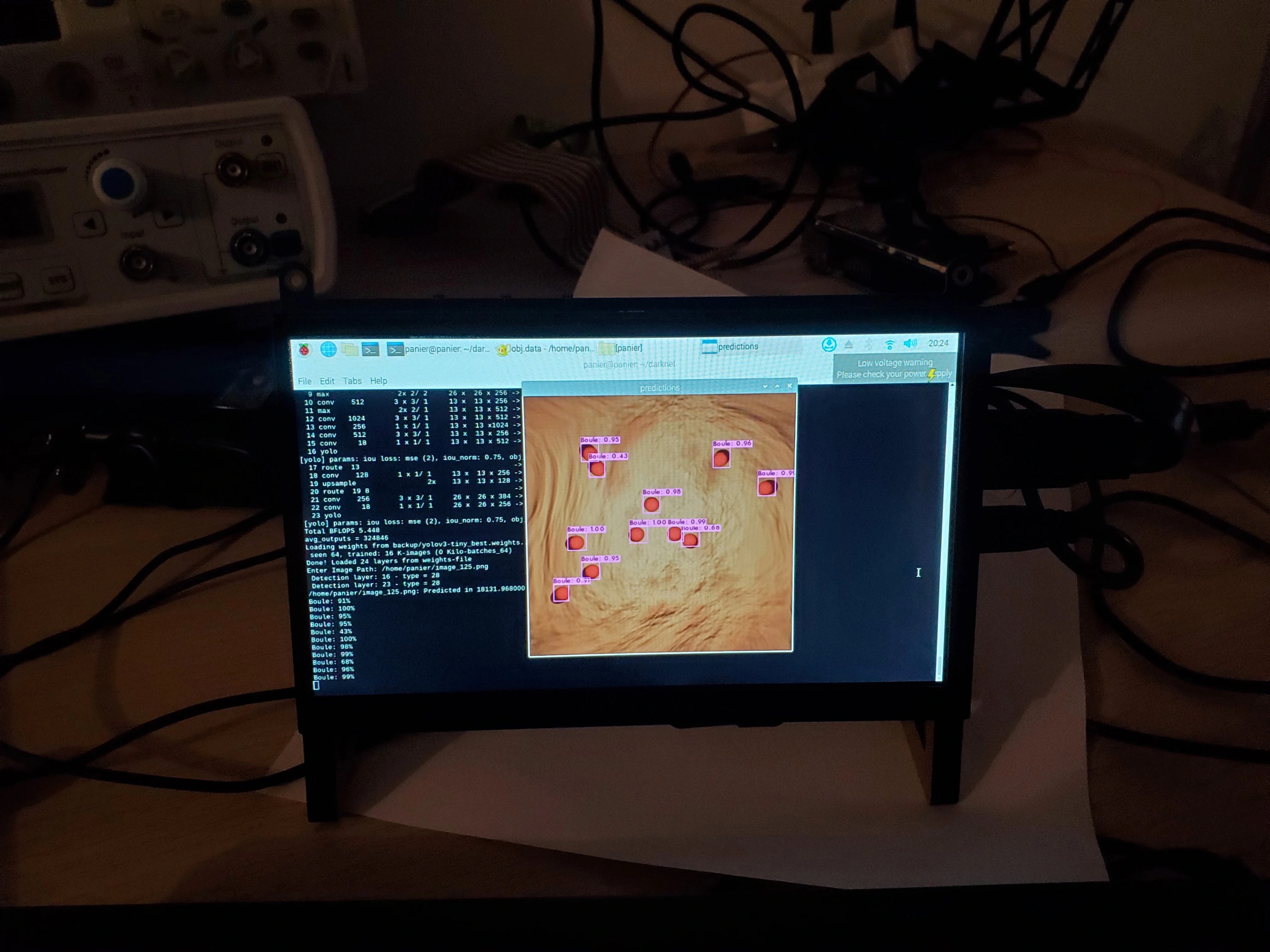
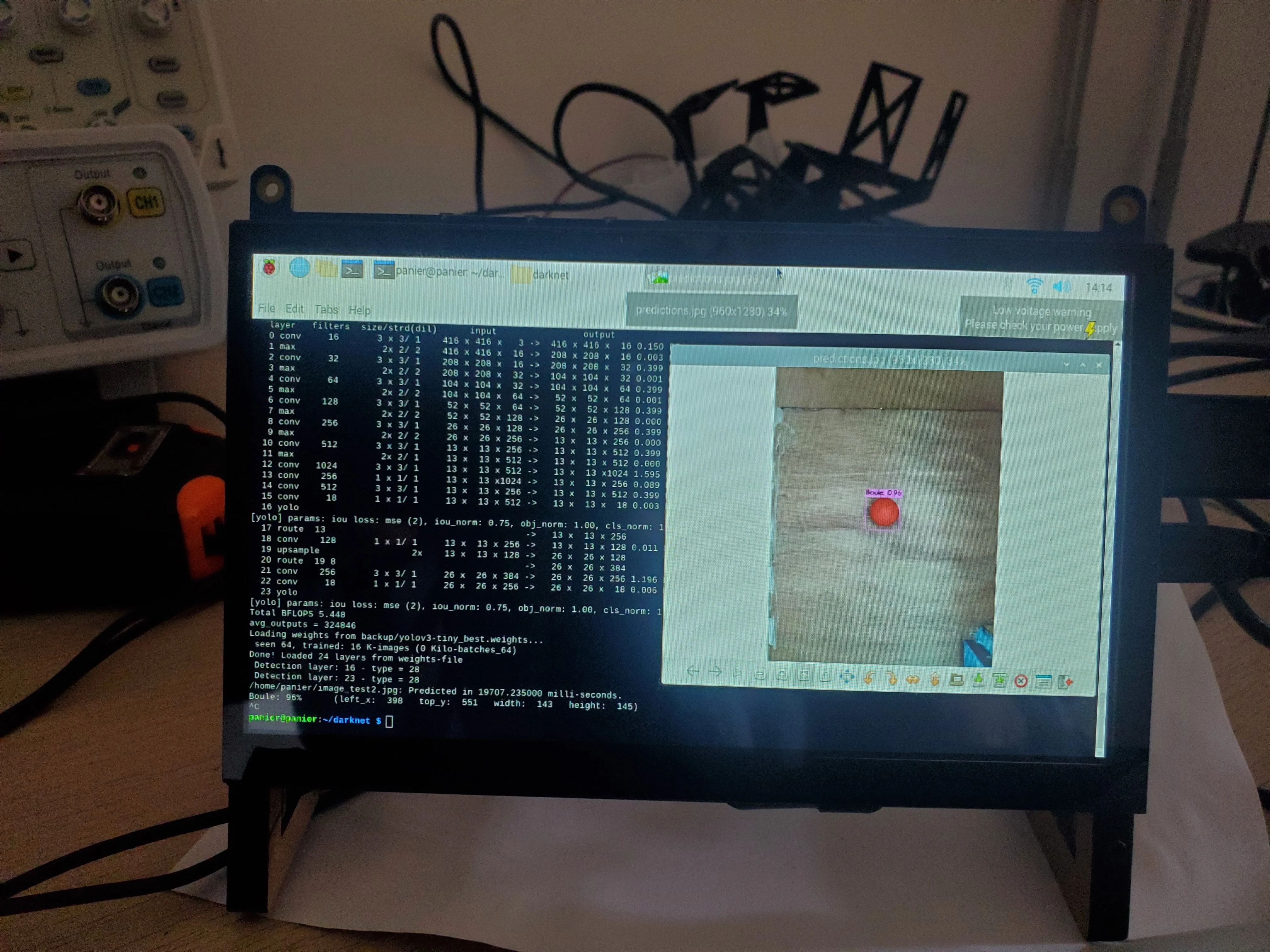
The basket I created to count red balls using machine learning behind the yellow robot of our Eirbot team during my second year of engineering school
Result of network detection of red balls on an image of the validation set created in Blender
Result of the network detection of red balls on a real image from the basket used during the French Robotics Cup after that our robot throws a ball into it
Dynamixel servo motor configurator module that I created during my first year engineering school internship
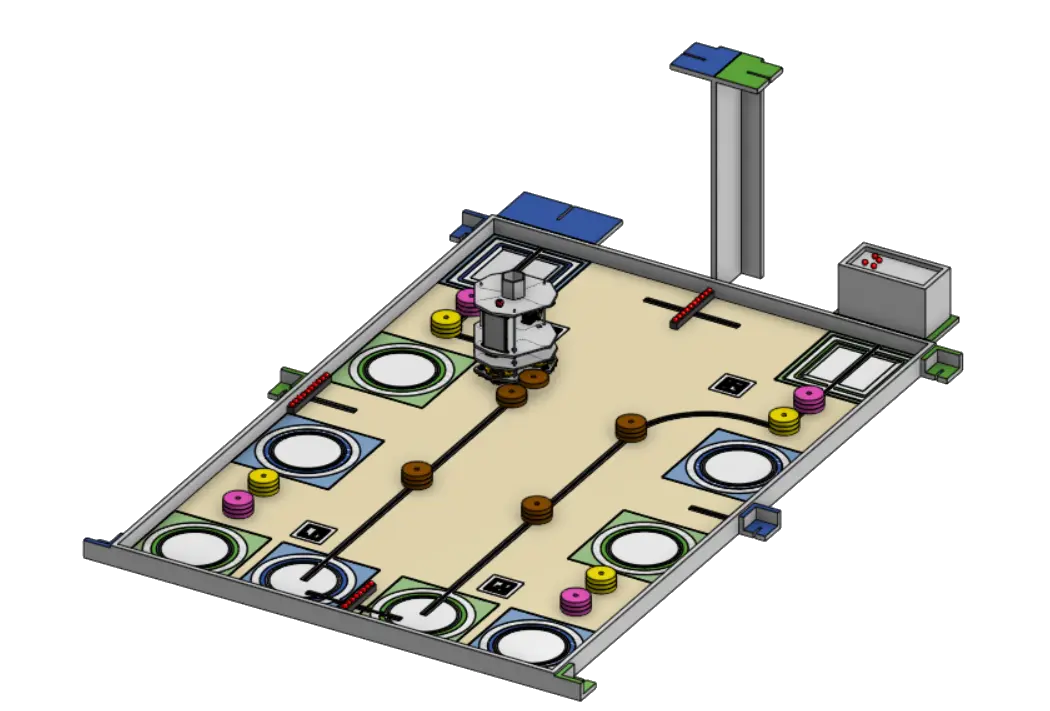
CAD model of HARP1 on the robotics table of the French Robotics Cup made with Onshape
HARP1 immediately after passing homologation at the 2023 French Robotics Cup
HARP1 running its match routine
First project in my robotics course made with 5 other classmates: a line-following robot
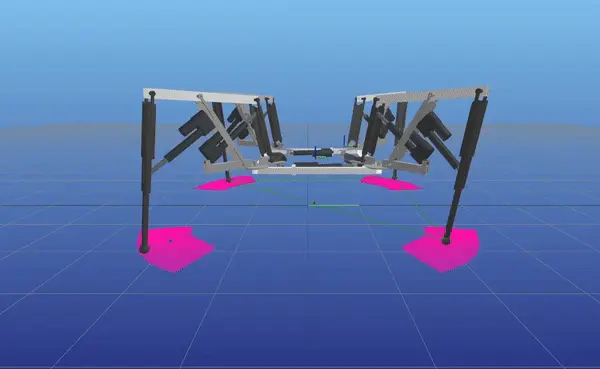
MegaBot: a 250 kg quadruped robot capable of carrying a passenger. From Eirlab, the Bordeaux INP Fablab
Implemented creeping gait simulation on the MegaBot with quadratic programming to avoid kinematic closed loop
Deployment of creeping gait algorithm on the MegaBot with quadratic programming to avoid kinematic closed loop
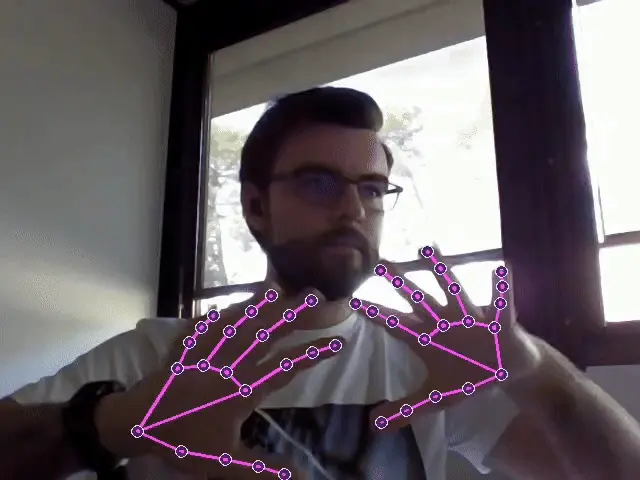
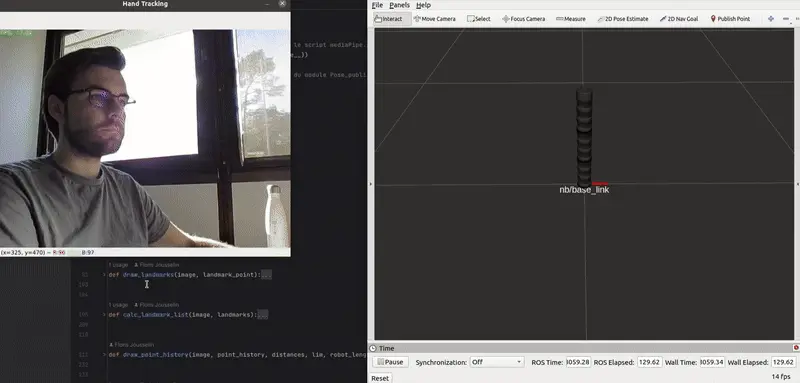
Hand pose traking with MediaPipe
HMI to control the robotic arm of Nimbl'bot by hand movements used in simulation. Created during my internship in my second year of engineering school
Deployed HMI to control the robotic arm of Nimbl'bot by hand movements. Created during my internship in my second year of engineering school
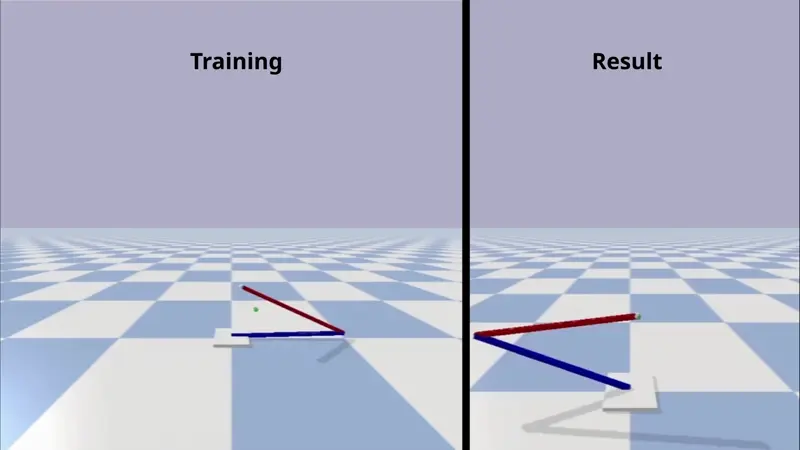
PPO Neural Network Training for 2-DOF Robotic Arm End-Effector Control
 My Profile
My Profile

Graduate School in Electronics, Computer Sciences, Telecommunications, Mathematics and Mechanics
Mathematics, Physics and Engineer Sciences

I work on citing the works that inspired or assisted me in achieving my results. I kindly ask you to do the same if my work has been of help to you.